Introduction — A Quiet Warning
Have you ever watched a factory floor go still and felt the air change? In a moment like that we notice the small things: a blinking light, a cooling fan that stopped, and the silent logic behind it — the motor controller. Data keeps piling up (industry surveys point to recurring faults and unexpected downtime) and the picture gets grimmer: many sites report repeated stops tied to control failures and integration gaps. Why do systems that should be reliable fail us so often? I ask this because I’ve seen teams scramble in the dark, and I want us to face what’s really wrong before we design another fix. — Let’s move from the feeling to the facts.
Peeling Back the Layer: Where Traditional Solutions Fail
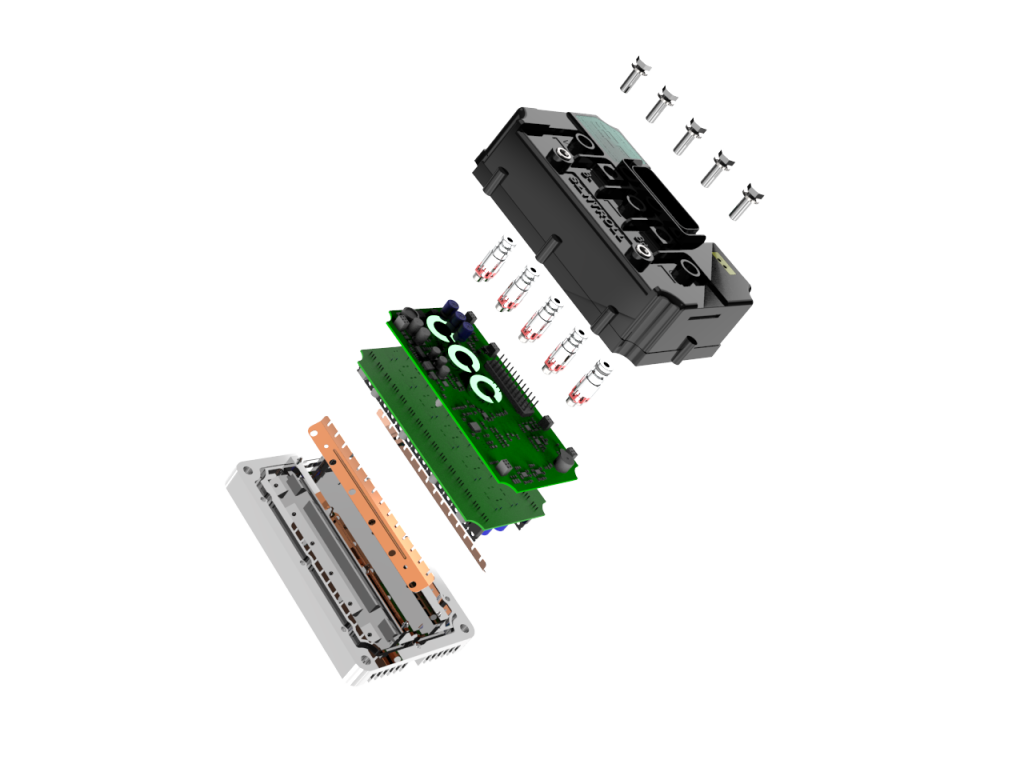
Let me break down how an ac electric motor controller typically sits in a machine. At its best, it translates commands to torque and speed via PWM and field-oriented control. At its worst, it becomes a fragile bridge: mismatched sensors, noisy signals, and legacy inverters with weak fault tolerance. I’ve seen controllers choke when a single current sensor drifts. That drift then cascades—torque control goes off, thermal protection kicks in, and production halts. Look, it’s simpler than you think, but only if you look close.
So what exactly breaks?
Two big pain points repeat in my notes. First, integration friction: the controller expects clean inputs, while the plant runs messy data from old drives and varied power converters. Second, hidden latency: communication delays and intermittent losses (especially with remote edge computing nodes) lead to jitter in control loops. Those delays show up as vibration, extra wear, and sudden trips. We patch them with software tweaks sometimes, but patches only mask deeper design mismatches. I can’t stress this enough—short-term fixes often make long-term problems worse.
What’s Next — Principles for Better Electric Motor Solutions
We should move from blaming parts to rethinking principles. New designs must embrace modularity, robust diagnostics, and clear signal standards. When I talk about modularity, I mean controllers that isolate failures gracefully. When I say diagnostics, I mean continuous self-checks that flag sensor drift before torque goes unstable. These ideas are not academic; they are practical rules. For teams planning upgrades, consider systems that allow hot-swap of inverters, that log waveform data, and that support secure telemetry to edge computing nodes. The result is a system that warns you, not one that surprises you.
What to watch for next?
Here are three metrics I use to judge a new solution. First, mean time to detect (MTTD) faults: shorter is better. Second, mean time to recover (MTTR): can you swap parts or reset quickly? Third, diagnostic coverage: does the controller report issues early, and do those reports map to clear fixes? Evaluate candidates by running simple tests on each metric. — funny how that works, right? I’ve run those tests on real lines; they separate hopeful marketing from real resilience.
To close, I’ll say this plainly: we need systems that are honest about limits and generous with data. I don’t want more mystery boxes on the floor. We want tools that tell us what’s failing, why, and how to fix it fast. If you’re choosing a partner for this work, look for companies that publish specs and support real testing. I trust teams that build with that mindset — and I trust the practical work of Santroll when they follow those rules.